1. Introduction
1.1. Brief History on SPAR Nig
In crafting recognition for building on a strong identity, that brand gains scope into a community yearning for want. By promoting initiatives and driving the expansion of its network across Nigeria, SPAR Nig ltd, had evolved in the nigeria market with increased retail footprint and launch of about two stores in a short span in its expansion plan.
In the Nigerian context; It had relieved its first stores on 19 October 2008 in the SPAR Supermarket at Opebi, with accompanying stores at Surulere in October 2010 on a grand facade of ceremonial shopping feet. From SPAR Hypermarkets documentary on their retail sales area of about 1,000m
2 and 2,500m
2 in both locations of the state of Lagos
| [3] | "2019 Review". SPAR International. Retrieved 3 January 2021. |
[3]
. SPAR reportedly states the Surulere region caters for a momentous populace of up to 640,000 persons and 160,000 households across localities of different thriving business firms
| [3] | "2019 Review". SPAR International. Retrieved 3 January 2021. |
[3]
. Also, the SPAR Opebi, located off Allen way, Ikeja area pulls a population of the greater to about 1.2 million and 300,000 households across vicinity; having shoppers troops into the mall to benefit from a formal Supermarkets with good offering in retail experience
| [3] | "2019 Review". SPAR International. Retrieved 3 January 2021. |
[3]
.
The new innovation in stores provides a complete sensational experience for shoppers with a full hypermarket super offerings of beverage, food (un-perishable), grocery stuff, farm fresh fruit & vegetable, inhouse butchery, bakery stuff, wine, beer & spirits, Take-to-Go, household electronics, indifferent large range of items.
The Customers in Nigeria truly has associated the SPAR Brand with their quality and decor of their hypermarkets has helped SPAR Nigeria to attain its place as a fortier grocery hub for retail excellence. Their offering serves a good mix of different locally and globally produced products. The SPAR Nigeria now has quite a number of its hypermarkets with 14 locations and counting in Nigeria with some over 45,000m
2 of retail bowl area
| [3] | "2019 Review". SPAR International. Retrieved 3 January 2021. |
[3]
. Notably, there are eight stores in Lagos, two in Abuja and Port Harcourt with one in Enugu and Calabar as seen across the country.
Generally, the stores have been performing on a large scale with many people trusting the brand and enjoying its services. The stores reflect the global brand insight and pursuit for excellence, and this is seen by the various well-known brands it offers for sales in the shelve making most of its product a high roller. The history of SPAR can be traced far back to the Dutch owners who started at the early 18
th century
| [2] | "History". SPAR International. Retrieved 13 September 2018. |
[2]
.
The name was originally DESPAR, an acronym of the Dutch phrase
Door Eendrachtig Samenwerken Profiteren Allen Regelmatig (English: "through united co-operation everyone regularly profits")
| [2] | "History". SPAR International. Retrieved 13 September 2018. |
[2]
. The acronym was chosen to resonate with the verb
sparen, which (related to English
spare) means "save [money]" in Dutch and some other languages, among them German
and Scandinavian languages (with variants such as
spara or
spare). "Spar" is Dutch for "spruce tree", after which the logo was chosen. As the organization expanded across Europe, the name was abbreviated by dropping the
DE prefix
| [1] | "About us". SPAR International. Retrieved 13 September 2018. |
[1]
.
A lookup from spar-international online document tells that it was founded in the Netherlands in 1932, by Adriaan van Well, and now consists of more than 13,500 stores in 48 countries
| [1] | "About us". SPAR International. Retrieved 13 September 2018. |
[1]
. The company's name is derived from an acronym slogan
"Door Eendrachtig Samenwerken Profiteren Allen Regelmatig", which Van Well in the description of their brand translates as
"Everyone works better together" | [1] | "About us". SPAR International. Retrieved 13 September 2018. |
[1]
.
In 1988 SPAR South Africa became a wholly owned subsidiary of Tiger Brands, a holding company with a large diversified portfolio, however it was unbundled and listed as a separate company in 2004. In July 2014 Spar Group South Africa opened its first supermarket in Angola but no expansion of the brand is planned for this market
| [3] | "2019 Review". SPAR International. Retrieved 3 January 2021. |
[3]
. A SPAR shop may be owned independently, by a franchisee, or be part of a chain, depending on the model applied in any given country. The owners of the parent company vary from country to country and may include the shop owners themselves. The name and the current logo were most recently revised in 1968 by Raymond Loewy and have since remained unchanged
| [2] | "History". SPAR International. Retrieved 13 September 2018. |
[2]
.
1.2. The Statement for Problem
Given that substantially, has proven the capability of SPAR Nig growth in the retail business and evolved it stores into the digital age using advanced technology techniques employed as it introduces into the market. Thus, it portrays the need to close and constantly replenish and fill up the shelves with fast moving and high demand products as needed on the main bowl. Hence, the need to employ BOTS. The Bots are chosen because AGV are bulk and fitting into the aisle will require slickness and sophistication which can only be delivered using bots’ technology.
This will be primarily the first in the country as the SPAR Nig brand will introduce a technique never used before in retail superchain stores in Nigeria and probably in Africa. It will be observed that bots will work alongside customers and shelves pickers as the product required, demand and want will be captured constantly across the customer needs in the main bowl and promote more interaction with the staff and the employee of SPAR brand while increasing with customer satisfaction index rating.
1.3. The Objective
Since the paper will be purely an technical experimental alternative, and these bots will not actually be brought but using the current parameter will be designed layout to simulate the successful implementation of employability in the case as its scenario will reflect real live occurrence. Hence, the objective will aim to meet critical points in promoting and reaching the goal of the Bots use in retail super stores.
The Bots will run on a mapped floor on two scenarios, across the plan. This will show how both KIVA and R5 autostore can be introduced into the SPAR Nig outlet and how the entire structure will optimally reduce pickers walk around and achieve harmonic in the relation of Man-Machine, here bot. The defined route will be tagged across the floor plan as its aid the bots move more freely in a defined set of rules and obstruction can be detected to aid it from crashing onto incoming customers.
Hence, the scope of the paper will be a work around following the criteria which will aid the implementation technique to be used in the upcoming section of the design layout plan for bot integration:
1) Identification of KIVA and R5 autostore bots to be employed on the existing plan.
2) Remodeling of the plan section to assign each bot a specialty area and hence promote its efficacy.
3) Introduce the Bots as close as possible to the main bowl for easy running time and reduce drag.
4) Promote a redefined node for path across the entire superstore inclusive of its warehouse content.
5) Lastly, bring in synergy with the Bots and human interaction to reveal the innovation of the concept for application.
6) Relate this in a FLEXSIM model to simulate and picture adaptation which will show the concept and promote the idea in play as desired concept.
Using the scope in the guide, the entire layout will be analyzed by the FLEXSIM model and read time will reveal how efficient and effective the model becomes and aid future models for scalability and improvement.
Thus, before commencement a brief view of the literature of bots and its difference with AGV will be discussed in the adaptation of the AGV & BOT technology from inception to modern types and its uses.
2. The Literature (AGV & Bots)
2.1. Concept of AGV and Auto-Bots
The subject of this project starts with the phenomenal Automated guided vehicle. So, what is AGV? An automated guided vehicle or automatic guided vehicle (AGV), also called autonomous mobile robot (AMR), is a portable robot that follows along marked long lines or wires on the floor, or uses radio waves, vision cameras, magnets, or lasers for navigation
| [8] | AGVE Group: AGVE-Discover our AGV's; Available from: https://www.agvegroup.com/agv-systems/technologies/navigation |
[8]
. Their occurrences are used in technological, industrial and warehouse applications in lifting and transporting larger heavy materials in/through large industrial factories, buildings or warehouses.
The AGV can tow-drag objects behind them in trailers to which they can autonomously attach. The trailers can be used to move raw materials or finished products. The AGV can also store objects on a bed. The objects can be placed on a set of motorized rollers (conveyor) and then pushed off by reversing them. AGVs are employed in nearly every industry, including pulp, paper, metals, newspaper, and general manufacturing. Transporting materials such as food, linen or medicine in hospitals is also done
.
An AGV can also be called a laser guided vehicle (LGV)
. In Germany the technology is also called
Fahrerloses Transportsystem (FTS) and in Sweden
förarlösa trucker . Lower cost versions of AGVs are often called Automated Guided Carts (AGCs) and are usually guided by magnetic tape
. The term AMR is sometimes used to differentiate the mobile robots that do not rely on their navigation on extra infrastructure in the environment (like magnetic strips or visual markers) from those that do; the latter are then called AGVs
. The AGCs are available in a variety of models and can be used to move products on an assembly line, transport goods throughout a plant or warehouse, and deliver loads
.
The first AGV was brought to market in the 1950s, by Barrett Electronics of Northbrook, Illinois, and at the time it was simply a tow truck that followed a wire in the floor instead of a rail
. Out of this technology came a new type of AGV, which follows invisible UV markers on the floor instead of being towed by a chain. The first such system was deployed at the Willis Tower (formerly Sears Tower) in Chicago, Illinois to deliver mail throughout its offices
.
Figure 1. Example of a Packmobile with trailer, typical existing AGV. (Wikipedia).
Over the years the technology has become more sophisticated and today automated vehicles are mainly Laser navigated e.g. LGV (Laser Guided Vehicle)
. In an automated process, LGVs are programmed to communicate with other robots to ensure product is moved smoothly through the warehouse, whether it is being stored for future use or sent directly to shipping areas
. Today, the AGV plays an important role in the design of new factories and warehouses, safely moving goods to their rightful destination
| [11] | "The Basics of Automated Guided Vehicles"; Archived 2007-10-08 at the Wayback Machine. AGV Systems. Savant. 5 March 2006. |
[11]
.
The AG’s are generally classified into various types, which can be sorted for different specific work processes. Their shapes and various sizes in capabilities for workload and range of operation in heights/complexity. The different various AGV’s which are commonly available in the industry seen today and where they could be employed in services of goods and manufacture
.
1)
Towing Vehicles (also called "tugger" vehicles) were the first type introduced and are still a very popular type today. Towing vehicles can pull a multitude of trailer types and have capacities ranging from 2,000 pounds to 160,000 pounds
| [5] | Wikipedia: Automated guided vehicle; Available from: https://en.wikipedia.org/wiki/Automated_guided_vehicle (accessed 14 December 2024) |
| [12] | Common AGV Applications: Raw Material Handling" JBT Corporation. 18 March 2009. |
| [13] | Work in Process Movement with AGVs" JBT Corporation. 18 March 2009. |
[5, 12, 13]
.
Figure 2. Tugger AGVs can move trailers or trains of trailers more safely than a manually operated tugger. (Wikipedia).
2)
AGVS Unit Load Vehicles are equipped with decks, which permit unit load transportation and often automatic load transfer. The decks can either be lift and lower type, powered or unpowered roller, chain or belt decks or custom decks with multiple compartments
| [5] | Wikipedia: Automated guided vehicle; Available from: https://en.wikipedia.org/wiki/Automated_guided_vehicle (accessed 14 December 2024) |
| [12] | Common AGV Applications: Raw Material Handling" JBT Corporation. 18 March 2009. |
| [13] | Work in Process Movement with AGVs" JBT Corporation. 18 March 2009. |
[5, 12, 13]
.
Figure 3. Tugger AGV towing multiple trailers in a warehouse environment. (Wikipedia).
3)
AGVS Pallet Trucks are designed to transport palletized loads to and from floor level, eliminating the need for fixed load stands
| [5] | Wikipedia: Automated guided vehicle; Available from: https://en.wikipedia.org/wiki/Automated_guided_vehicle (accessed 14 December 2024) |
| [12] | Common AGV Applications: Raw Material Handling" JBT Corporation. 18 March 2009. |
| [13] | Work in Process Movement with AGVs" JBT Corporation. 18 March 2009. |
[5, 12, 13]
.
Figure 4. Unit load AGV (dual). (Wikipedia).
Figure 5. Forklift AGV with Stabilizer Pad. (Wikipedia).
4)
AGVS Fork Truck can service loads both at floor level and on stands. In some cases, these vehicles can also stack loads in a rack. They can sometimes lift to 30' to store or retrieve on high-bay racking
| [12] | Common AGV Applications: Raw Material Handling" JBT Corporation. 18 March 2009. |
| [13] | Work in Process Movement with AGVs" JBT Corporation. 18 March 2009. |
[12, 13]
.
Figure 6. Hybrid AGV picking load. (Wikipedia).
5)
AGVS Hybrid Vehicles are adapted from a standard man-aboard truck so that they can run fully automated or be driven by a fork truck driver. These can be used for trailer loading as well as moving materials around warehouses. Most often, they are equipped with forks, but can be customized to accommodate most load types
| [12] | Common AGV Applications: Raw Material Handling" JBT Corporation. 18 March 2009. |
| [16] | Automated Trailer Loading AGVs" JBT Corporation. 18 March 2009. |
[12, 16]
.
6)
Light Load AGVS are vehicles which have capacities about 500 pounds or less and are used to transport small parts, baskets, or other light loads through a light manufacturing environment. They are designed to operate in areas with limited space. Also, they are
AGVS Assembly Line Vehicles: are an adaptation of the light load AGVS for applications involving serial assembly processes
.
Before the explanation of the design philosophy, look at some few concepts of superstore. The warehouse is a critical part of the management and control of flow of products in and out of the store. What is a Warehouse Management System? A Warehouse Management System is used to control the overall flow of materials through the warehouse or a distribution center
| [9] | "Linking warehouse complexity to warehouse planning and control structure: An exploratory study of the use of warehouse management information systems". International Journal of Physical Distribution & Logistics Management. 32(5): 381–382. https://doi.org/10.1108/09600030210434161 Faber, Nynke; de Koster, René (Marinus) B.M.; van de Velde, Steef L. (2002-01-01). |
[9]
(cc. van de Velde, Steef L. et al). A WMS at its core is flow-designed to track as inventory is processed into shelves, stored, taken around, or and transferred from facilities, while ensuring a systematic productive way to the distribution processes
| [22] | “Secrets of Successful Simulation Studies”, Industrial Engineering 22: 47-48, 51-53. 72. Averill M. Law & Micheal G. McComas, 1990. |
[22]
. While distinctive WMS systems offer various capabilities, the predominate modules active in the following process areas
| [12] | Common AGV Applications: Raw Material Handling" JBT Corporation. 18 March 2009. |
[12]
:
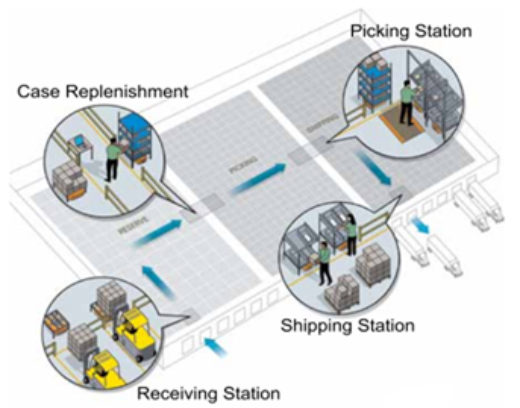
1) Picking
2) Replenishment
3) Receiving
4) Slotting / Packing
5) Labor Management
6) Quality Control/Quality Assurance
7) Shipping/Location Management
Generally, Automated Guided Vehicles (AGV) are used in various processes in the complexities of transporting different goods and material including carts, rolls, racks, pallets and containers. AGVs exceed in the applications of the following characteristics
| [11] | "The Basics of Automated Guided Vehicles"; Archived 2007-10-08 at the Wayback Machine. AGV Systems. Savant. 5 March 2006. |
[11]
:
1) Repetitive materials movement of over a long distance
2) Frequent delivery of loads
3) Medium flow throughput/size
4) Right on-time/ last miles deliveries at critical and night shift deliveries in grave inefficiency
5) Operations with complex shifts
6) System tracking of material and secure process of important
The KIVA and R5 bot Systems provides an intricate approach to automation fulfillment in order management using a varied fleet of mobile robot driving units, dynamic shelves, workstations port and sophistication in control software system.
To pick, pack, and ship operations; operators stand across station ports perimeter of the warehouse building within the inventory mobile shelving racks, which are called pods
| [7] | RoboticsTomorrow: How kiva systems and warehouse management system interact, Available from: https://www.roboticstomorrow.com/article/2011/12/how-kiva-systems-and-warehouse-management-systems-interact/23/ |
[7]
. These pods are arranged in a grid pattern in the interior of the building; when an operator requires an item for an order, a mobile robot brings the pod containing that item to the worker’s station
.
The worker picks the items they need out of the pods and places them into the orders they are working on. Once the items have been picked, the mobile robots return each of the pods they are carrying to a storage location on the grid floor. These are usually a different location than the one it picked the pod up from. Each worker is usually supported by 5-10 mobile robots, so they are kept continuously busy filling orders
.
The Kiva system found usefulness in both full and split-case packaging, and slow pace moving stock, as customary in manufacturing and storage in a range of product categories and different industries
| [7] | RoboticsTomorrow: How kiva systems and warehouse management system interact, Available from: https://www.roboticstomorrow.com/article/2011/12/how-kiva-systems-and-warehouse-management-systems-interact/23/ |
[7]
. In inventory, KIVA and R5 System become mobile so every worker can quickly access refillment of the products to order in a timely manner.
The KIVA and R5 solutions are a complete revolution of stock and order fulfillment which incorporates hardware integration and software drivers installed to improve replenishment, picking, and supply/shipping process. During implementation, client’s systems are integrated into the enterprise software which serves as the primary interface point BUS connection with the warehouse management system
| [7] | RoboticsTomorrow: How kiva systems and warehouse management system interact, Available from: https://www.roboticstomorrow.com/article/2011/12/how-kiva-systems-and-warehouse-management-systems-interact/23/ |
[7]
(WMS). This form of mate between the WMS and an AGV software system so the AGV becomes the picker and order sorter across the zone within the facility and across the main ops area under the WMS control
| [7] | RoboticsTomorrow: How kiva systems and warehouse management system interact, Available from: https://www.roboticstomorrow.com/article/2011/12/how-kiva-systems-and-warehouse-management-systems-interact/23/ |
[7]
as in
figure 7.
Figure 7. The KIVA strategy for the Warehouse management system for logistics firms. (KIVA system).
In a success-point, the Kiva solution brings a lot of value for shipping and delivering fulfilled orders onto the specific docks at an efficient sequence and shortest timing to optimize loading of trucks, safety, route plans and the efficacy in delivery out of the warehouse
| [7] | RoboticsTomorrow: How kiva systems and warehouse management system interact, Available from: https://www.roboticstomorrow.com/article/2011/12/how-kiva-systems-and-warehouse-management-systems-interact/23/ |
[7]
.
Quality in highest regards becomes the core benefit of the Kiva/R5 system within its standard system-guided scope of work. They come with indicators equipped with laser pick-light for picking and replenishment aided by the lights for directing item placement into orders, barcode and scanner
| [15] | Laser Pallet Handling AGVs with Yale Balyo Corporation, 31 August 2017. |
[15]
. Operators use easy-to-follow handheld device touch screens to accurately correct items and quantities integrated in the system. As such, eliminating rigorous quality control (QC) checks. Bot recognizes how critical quality assurance is needed and this is measured across operations and other levels of quality spot control process
| [7] | RoboticsTomorrow: How kiva systems and warehouse management system interact, Available from: https://www.roboticstomorrow.com/article/2011/12/how-kiva-systems-and-warehouse-management-systems-interact/23/ |
[7]
.
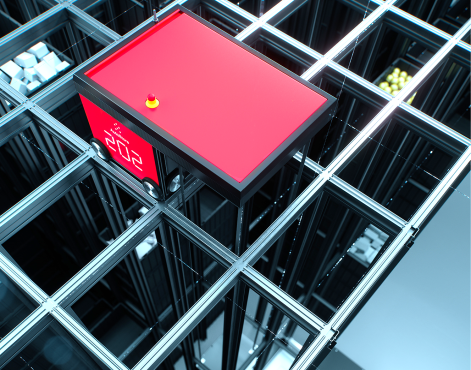
The KIVA and R5 Mobile (
figure 8) AGV Fulfillment solution automation technology for distribution environments becomes an innovative process. The AGV systems typically can be integrated into most WMS packages. During the replenishment, the system chooses the best pods based on a sophisticated strategy coded in that encompasses pod type, its merchandise characteristics, open available pod space, the proximity to fulfillment and picking item consolidation. Details like expiration dates, lot, integrity case, items, product with SKU inflow associated with other factors. The deciding code in the software sets product characteristics including weight, pick acceleration and ergonomics packs. There can be some overlap in functionality between AGV and WMS applications being operated, but in any case the main duty of a KIVA bot is for forward picking and packaging within the distribution center zone and processes operations overseen by the WMS
| [7] | RoboticsTomorrow: How kiva systems and warehouse management system interact, Available from: https://www.roboticstomorrow.com/article/2011/12/how-kiva-systems-and-warehouse-management-systems-interact/23/ |
[7]
.
Figure 8. R5 concept of store racks and product storage shelves in logistics firms. (autostore).
2.2. Experimental Setup and Methodology
An experimental flow will be analyzed using the layout of the Ikeja SPAR superstore. This will allow a map of the areas where the KIVA and R5 will operate since their systems are of different characteristics. This will allow the pickers and movers to work at different places and at different speeds for the AGV to be more efficient since there will not be many AGV’s which will be employed into the solution. Thus, experimentally a setup will review these challenges and encompass the solution using the method of employing the KIVA in the heavier section and the R5 inside the superstore for their shelf replenishment. This will synchronize the warehouse in a more orderly manner, control traffic in a logical sense and achieve the efficiency thought of a good Warehouse management system i.e., WMS.
Since this will be purely a theoretical CAM base objective approach, the need for examining the entire floor plan in totality of the store will not be required. The data retrieved from online journals and catalog, especially google images of SPAR stores with its content will be used to conduct the model. The R5 and KIVA will also not be required in Real Time as only technical facts existing will be considered in the model of the entire system employing best fit to the right location.
Generally, the working principle of an AGV can be simulated using CAM software, and this will not be a hindrance. The operational model will allow analysis on various aspects of the AGV such as Bots R5 and KIVA to be introduced and interpreted for the sake of the implementation. Further research may still need to be addressed but this will not be in the constraint of SPAR Ikeja, and the warehouse concept as adopted here. All instrumentation will be theoretical with computer graphic and model being the ideal finished result of the method applied. Considering the outcome of the model the scenario used will determine the analysis and results of the experimental setup for each model if the models will be more than one. The CAM FLEXSIM will be employed here, as it will enable a time-fast method in bringing the model to reality from test and analysis.
FlexSim has been used to automate simulation model development for more than a decade; a 2008 study described a FlexSim-based solution that communicates with Product Lifecycle Management (PLM) software to generate simulation models
| [19] | "About Us - FlexSim". FlexSim. Retrieved 2021-01-22. |
| [20] | "Release Notes and History". FlexSim Documentation. Retrieved 2021-01-22. |
[19, 20]
(cc
FlexSim doc). With the quest of Industry 4.0 revolution in speed to push manufacturers into automation and sync improved communication bandwidth, FlexSim as a simul-desk has high use to develop computer simulation models for these applications as light speed
| [20] | "Release Notes and History". FlexSim Documentation. Retrieved 2021-01-22. |
[20]
. Generally, the purpose of simulation software, such as FlexSim can be used in a number of process/ fields
| [19] | "About Us - FlexSim". FlexSim. Retrieved 2021-01-22. |
| [20] | "Release Notes and History". FlexSim Documentation. Retrieved 2021-01-22. |
[19, 20]
:
1) Material/handling: Lift-Conveyor process, Autos robots in manufacturing (AGV), packaging stacking, bulk warehousing
2) Logistics and Process distribution: Container Port terminal, Rail operations, manufacturing and supply chain, design distribution, retail center workflow, service, and storage facilities, etc.
3) Transportation Process: Road Highway traffic system, Train transit station tunnel/ pedestrian walk flow, maritime ship vessel and waterway coordination, custom containers traffic and decongestion, etc.
4) Others apps: Oil mining fields, solid mining fields, Pipe/conveyor networking data flowing process, etc.
Let not forget that KIVA and R5 have been used in the past and presently being used by advanced logistics firms and companies of logistics solutions in the industries. The approach here will introduce the need for technological and perhaps industry 4.0 approach to warehouse management in the African concept and in Nigeria market which will be the game changer for SPAR brand and reflect a new experience for her esteemed customers. The
Figure 9, completely outlines the principle and specification of the bots on their sophistication in bringing the whole of logistics warehouse good fulfillment in an automated manner reducing human interaction and accident related cause and incidents to the barest minimum.
Figure 9. The KIVA and R5 in action in the logistics center. (KIVA system and autostore).
The KIVA and R5 has the following technical specification as below enumerated:
Table 1. Technical Specification for R5 and KIVA AGV system bot.
S/.NO. | Technical Built Specification for R5 | Technical Built Specification for KIVA |
| Dimension Measurement. R5; Width: 700 mm (2.3 feet) / Length: 963 mm (3.2 feet) Robot Weight-R5: 145 kg (319 lbs) inclusive batteries. Power pack/Wphr. 100 Watts (Under operation) Operational temperature. 2°–35° C (35°–95° F) Speed Attainable. 3.1 m/s (11 km/h) / 10.2 ft/s (7 mi/h) Pickup Acceleration. 0.8 m/s² (2.6 ft/s²) (cited: AutoStore-AS, ) | Kiva Frame Chassis Dimensions: Circular 3D Height-Width-Depth = 25.6 in (65.1 cm); Slide Rack Mount Kit Inclusive Kiva Frame Chassis; Max Weight: 75 lbs. (34 kg) Kiva Max Power Consume: 500 Watts Standard Voltage: 100-240 VAC Frequency: 50-60Hz Automatic-Sensor for AC Power Input charge Pickup Acceleration. ~1.0 m/s² (2.9 ft/s²) (cited: KIVAsystem; | [7] | RoboticsTomorrow: How kiva systems and warehouse management system interact, Available from: https://www.roboticstomorrow.com/article/2011/12/how-kiva-systems-and-warehouse-management-systems-interact/23/ |
[7] |
(Source: KIVA system and autostore)
The specification guides the localization and the quantity of bots to be deployed into the mall. Given that the speed and the weight per payload will be a very good deciding factor, the bots will be limited to the frequency of request and the maximum payload to be carried by a physical human. As the bot for example KIVA would get to lift a weight 2 times that of a human capacity, it guarantees the lifts and the movement of this weight at an extraordinary pace and the delivery become seamless as it fulfills the requester call. Thus, a total number of 15-20 KIVA and 5-8 R5 autostore bots will be implemented into these proposal setups, meeting the frequency rate and payload specification needed.
2.3. Model Design and Simulation Approach
A Warehouse Management System is a complex task as it involves the planning, control and decisions that connects to goods or item inbound, storage and outbound flows
| [21] | “Redesign of warehouse process with an application of object-oriented simulation method”; Monika Kazmierzak and Hanna Sawicka. |
[21]
(Faber et. al., 2013) as cited by Monica et al., 2017. Different criteria are considered in assessing warehouse process evaluation including the cost of warehousing, the level of rotation, the quantity of damaged goods, space utilization, utilization of technical resources, rate and speed of order fulfillment and accuracy of order.
As the storage service market continues to evolve, it is important that innovative technologies such as KIVA and R5 systems are implemented for cost optimization and positioning for competitive advantage in terms of market share among other metrics.
Most research shows that not less than 50% of storage and warehousing cost is engulfed by the picking and packing phase which implies implementing an automated assisted technology such as KIVA and R5 would go a long way in saving the company used as case study in this research paper time, money and employee energy which leads to overall improved warehouse management systems by optimization of the picking, sorting, and packaging activities by the AVG’s.
According to A.M Law et al., 1991, the implementation of simulation modeling for designing new systems to improve the existing system is fast gaining more ground more importantly with the surge in the complexity of modern-day systems, computational cost reduction, various software improvements and the availability of animation
| [18] | “Simulation Modelling and Analysis, 2nd Edition, 1991”; Law, A.M. and Kelton, W.D, McGraw Hill, New York. |
[18]
. In highlighting nine important elements that guarantees the success of a design simulation and modeling process as follows
| [18] | “Simulation Modelling and Analysis, 2nd Edition, 1991”; Law, A.M. and Kelton, W.D, McGraw Hill, New York. |
[18]
:
1) Having the knowledge of the methodology of simulation, stochastic models of operations research (for instance Queueing theory, probability theory and statistics)
2) Accuracy of problem formulation (i.e., having the knowledge of the performance issues of the existing system can help to know the appropriate level of model details).
3) Access to the right information about the system’s operating procedure and logic control.
4) Randomly modeling the system in a reasonable way.
5) Adopting or selecting the correct simulation software and using it correctly (For this study, the simulation software package adopted is Flexsim eliminating the need for programing which saves time and cost).
6) Validating and giving credence to the established model.
7) Employing the proper statistical procedures for interpreting the output (classical statistics techniques for independent data not applicable directly)
8) Employing excellent project management techniques.
(cc: A.M Law et al., 1991)
In creating a model, two approaches can be utilized being the structural and object-based approaches
| [21] | “Redesign of warehouse process with an application of object-oriented simulation method”; Monika Kazmierzak and Hanna Sawicka. |
[21]
(Olczyk, 2010) as cited by Monica et al., 2017. The structural approach makes use of structural programming languages while the object-based approach is the core modeling that represents the system imitation. For this study, the second approach is adopted where the activities of the KIVA and R5 with the Spar Nigeria Ltd storage space is modeled using an object-based simulation tool known as FlexSim to suggest solutions to the existing problems with picking and packing in the store.
For simulation and modeling to be achieved, there is a need to first analyze the key activities and mapping of the processes in the SPAR Nigeria Ltd warehouse system. Thereafter, simulation and modeling are carried out with the output serving as a pointer for identifying the bottlenecks in the warehouse system of the store. Hence, the need for redesigning the processes for improvement possibilities.
The simulation inputs are the store or warehouse activities commonly performed manually that the new design aims at replacing using the KIVA and R5 systems or technology.
The validation technique adopted in the simulation and modeling is structural walk-through to detect errors and ensure the consistency of the model performance. Probability distribution and analysis of the design output data were all selected. Here, animation was adopted as the debugging tool, and all implemented via the FlexSim.
According to Law and Kelton 1991; sensitivity analysis is most preferred to check the aspect of the model (an input parameters, a probability distribution or level of detail in a subsystem) has the greatest impact on the desired performance measure to prioritize that aspect in terms of carefulness of designing that aspect of the model
| [18] | “Simulation Modelling and Analysis, 2nd Edition, 1991”; Law, A.M. and Kelton, W.D, McGraw Hill, New York. |
[18]
(Law, A.M. and Kelton, W.D.). He also established in his “Simulation Modelling and Analysis” that the validity of a simulation model is to know that the performance measure is closely approximate to the expected or proposed performance configuration of the system which means the degree of aligning or resemblance between the existing system and the proposed system increases the confidence level of the proposed system
| [18] | “Simulation Modelling and Analysis, 2nd Edition, 1991”; Law, A.M. and Kelton, W.D, McGraw Hill, New York. |
[18]
. (Law, A.M. and Kelton, W.D.)
A model will be designed using CAM software, a preparation of the model environment will simulate the activities that the AGV will assist in carrying out in the warehouse. The SPAR Nig. ltd has a medium size warehouse with about 8,000 sqm as described in the layout
| [3] | "2019 Review". SPAR International. Retrieved 3 January 2021. |
[3]
. This will allow just a few numbers of KVIA to implement the lifting procedures and achieve the lifts from the trucks to the inventory area and from there to the pickers who will install this item into the WMS system.
The R5 duties will include storing these items on the shelf in the automated warehouse, a second location close to the entry point into the store from the service channel. This will allow the entire process of retrieval to be done from the automate Com point of the cube by a few service team members as they fulfill the request from the shelve pickers as they are served by a few KIVA inside the superstores.
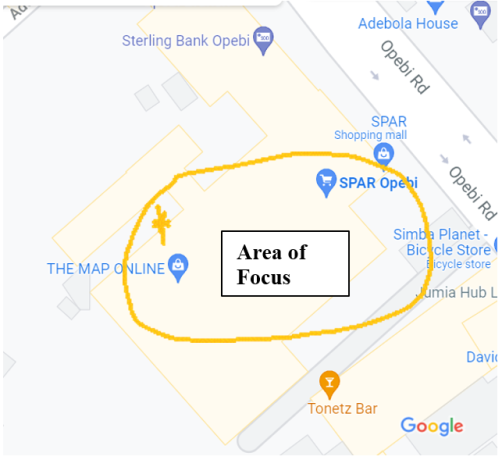
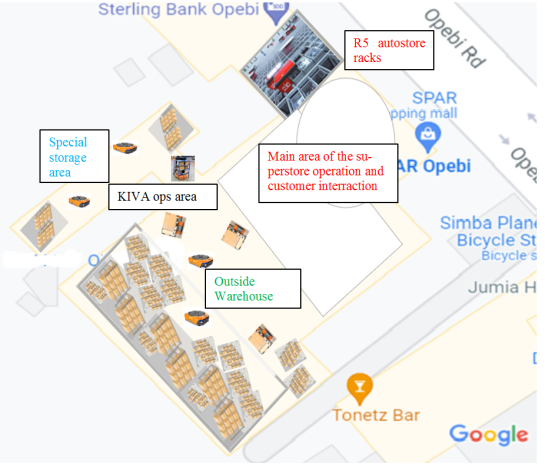
To commence, the existing layout of the store and the warehouse are as described in the
figure 10 below. The shape of the layout makes it easier to install both process drive outlook on the store and introduction of technological improvement for the efficacy and staff optimum workload.
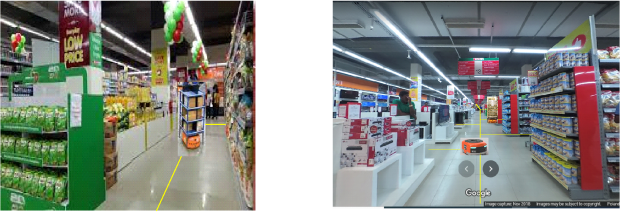
Figure 10. Layout configuration of Spar Nig ltd Ikeja, Nigeria. (google map).
The analysis will look at entry and exit points for the SPAR driveway and consider any improvement to accommodate the truck flow into the store. Furthermore, on the analysis as seen from the front view of SPAR Nig ltd Ikeja, will consider how the visitor parking to ensure no obstruction on the new improvement will affect the parking space for the store as allocated.
Figure 11. View of the entrance and exit for SPAR superstore Ikeja. (google map).
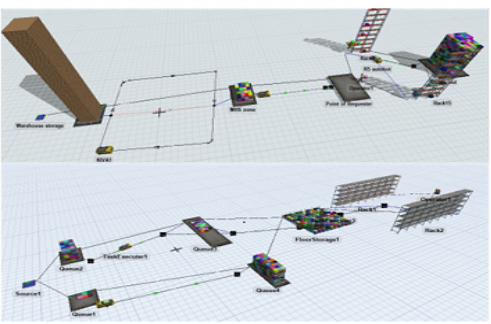
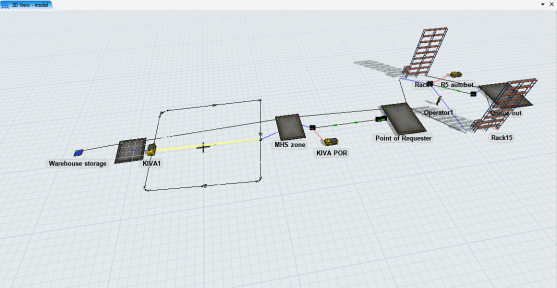
In all due consideration, a typical model can be mapped and created with existing nodes for the KIVA and R5 as assigned across the route. A pictorial representation of the entire structure will give further review on key critical indicators which will prove the functionality in the actual operations. A model on FLEXSIM will eventually have a view as below:
Figure 12. View on FLEXSIM using nodes for AGV operation in a logistics center. (author’s creation).
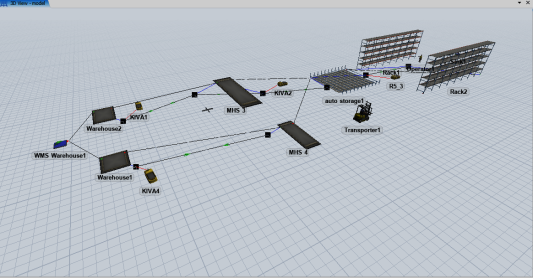
Generally, taking in account simulation methods as meant to be employed. The model as constrained across SPAR Nig Ltd, will be drawn in accordance with the principle adopted in the industry. The R5 zone will be situated at the extreme point close to the cashiers due to the need to feed from the front access which contains some drive thru, for this purpose. Glass open doors can replenish the R5 autostore system. The main warehouse which is located at the back of the plaza building carries the most space as it is used for the keeping of long, heavy, and larger items which can not be piled up in the store showroom. The fig below shows the model and simulation for the zoning of the entire store using the describe system previously pointed out.
Figure 13. Theme 1 for the zoning option applicable to the warehouse-storage-main bowl for SPAR Nig ltd. (author’s creation).
Consistently two themes have been modeled to provide a comparison to the likely option to select during the ERP system integration into the retail superstore. This inclusion will simulate the easier scenario to work with both the KIVA and the R5 bots. Here, speed of replenishment will be the focal issue of the meeting. The bots will be expected to navigate traffic of different order, which won’t be an issue.
Figure 14. Theme 2 for the zoning option applicable to the warehouse-storage-main bowl for SPAR Nig ltd. (author’s creation).
The KIVA will solely handle the back storage and the inner's special cold chambers while delivering to the requestor way front at the shelves. The network path will be the access track for the route, and these serve as the safety control for the bots and keeping them in orderly manner across the main bowl. Consequently, when run on the FLEXSIM program, a unified and fast-paced delivery is obtained with timing as low as 3 min topping at 5 min between the Warehouse and the retail floor achieving the set time requested on any WMS application. This gives the pickers comfort and control in a relaxed order.
3. Result and Discussion for Implementation
In the analysis of the described CAM model as implemented to SPAR Nig ltd, Ikeja, Nigeria. The whole of the super store has been remodeled to look and bring the facility into the modern warehouse of the 21st century using AGV has optimized the process as will be further described. A close look show, the existing description from the layout plan and how the improvement has optimized the arrangement across the layout area. Using Microsoft Visio can change the architecture to assign an area for the KIVA which will be at the existing open space canopy shed, while R5 works in the cover area of 700sqm inside the superstore. Here the R5 will work to optimize the small size packages and will be able to hold and store and retrieve as when needed to refill the shelves. Thus, the entire system will be semi-automated to aid the employee from carrying heavy loads and the AGV’s will do the following heavy lifting and move the packages closest to the assigned pickers who will load them onto the shelves for customers' preferences.
The
figure 15, below shows the detail for the improvement and how the entire plan has been remodeled. On the view of a plan of about 4200 sqm, the whole of the space is improved for ergonomic handling and less heavy lift or even lifts so that the employee can reduce strain and lift all products to the assigned shelves.
Figure 15. Description of the location of the KIVA & R5 AGV bots foresee implemented at SPAR NIG LTD, Ikeja. (author’s creation from photo library).
As sectioned from the
Figure 16, the superstore is divided into two segments to incorporate the operations of the KIVA and the R5 autostore bots. These will allow the entire operations from the point of the ergonomic point of view on lifting, carrying, and installing to be done by the auto bots. This system will be a WMS warehouse management system which will be implemented with the use of the bots.
Noting that the system for the R5 and KIVA are completely different, but their operation will be grouped in heavy materials and lightweight materials. The system responsible for this will be the MHS material handling system as it will locate and assign restock requests to the bots and the section zone to which the material is located will be given the assigned task.
Figure 16. Segmentation of the Mall for the KIVA and R5 WMS-MHS ERP. (author’s creation from photo library).
The mall will take a new approach as the entire ops will aid the employees and staff, each will mount on one location and with the ERP modules on the tablets, requests will be made and can be optimized at about 2 mins for the bots to fulfill the task. This will promote smooth running, reduce overhead, and increase technology inclusion with use of bots in superstore at retail level.
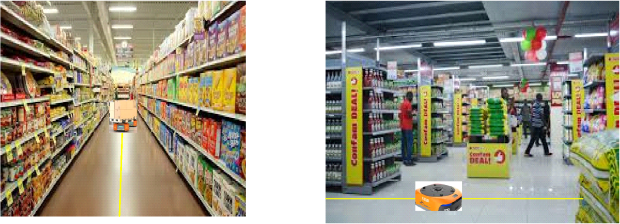
The retail store will become interactive, with the bots running around across segment tags drawn on the floor for the bot to track their location and the host request. This will mean, the staff will stand at the Point of Request POR and click on the goods required or requested and once the ERP synchronize with WMS, and the Geo-tracking will come online as the end point is given to a free bot who will lift the required shelf or rack and bring it to the POR staff. The fig below shows the ribs in action across the retail floor as they will stop for customers and obstacles and navigate their ways from the inner chamber zones (KIVA zones) to the POR staff location without incident.
The
figures 17-21, will reveal this approach and one can view the interaction of bots with esteeming customers in the store. A test scenario will be run with high and medium and low traffic to assist to map corresponding results.
Figure 17. KIVA coming from warehouse in action across the track navigating to and from POR staff. (author’s creation from photo library).
This will enable a complete guide when the bots come into action. The Tag tracks enable the bots to go and find or locate the POR requester and as its lodge or take back the items to the warehouse inner section out of the main bowl. This ensures staff are vigilant and control the items on the shelves while the WMS takes care of replenishment and order requests for restock up.
Figure 18. The bot maneuvering corners and traffic of the customers and staff as it fulfills its POR. (author’s creation from photo library).
And furthermore, description of the bots across the corridor of the main bowl with the KIVA completing the various POR from pickers and requesters all on automatic coordination across the floor.
Figure 19. KIVA lifting shelves, racks, and crates on the run. (author’s creation from photo library).
Due to the space across the aisle, this gives an opportunity for the bots to be able to maneuver the aisle and transport the shelves to the intended POR location. Creating a verse opportunity for space and weight per payload in shipment to the POR. Again, a lot can be tackled upon the bot as it transports to the POR creating avenues for efficacy in this retail mall.
Figure 20. R5 Installed shelves at the store lift material zones, enabling smaller goods fulfillment at SPAR. (author’s creation from photo library).
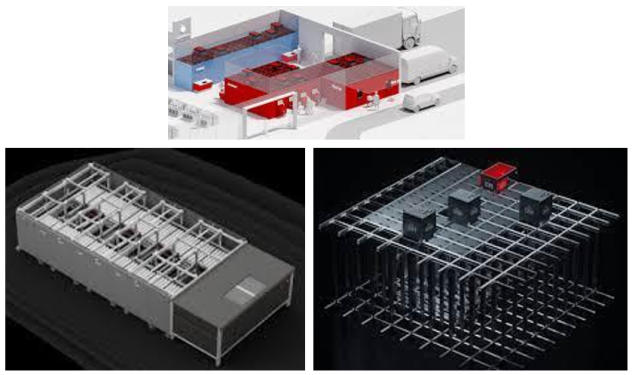
The R5 bots will be used in the lightweight zones. Here all the bots will be used to lift baskets on the racks and installed on the tray. The items here will be fast moving stock (FMS), and it will require max 5 bots of the R5 on a 250 sqm. The bots will ensure quick fulfillment of the requester POR and they will close out the shelf’s gaps using these techniques. Those here will be those with a short Best Before (BBF) date, which will enable proper stock monitoring and management as the goods will be efficiently tracked. The figure below shows the schematic illustration of the R5 auto store to be installed and how it will be incorporated into the SPAR retail mall superstore.
Figure 21. 6 BOTS R5 auto store warehouse scheme for SPAR NIG ltd. (autostore).
Importantly, the R5 takes the critical item chain as it ensures it matches all light fast moving goods and ensures the light stock is evenly well stocked. Also, because of its nearness to the shelves it becomes easy to track and replenish on a more frequent cycle.